Dans le cadre de mes compétences en systèmes embarqués, mon professeur d’électronique m’a passé commande pour
réaliser un ESIEAbot destiné à une Journée Portes Ouvertes (JPO) lorsque j'étais à
l’ESIEA. Le robot utilise la technologie infrarouge et peut être contrôlé grâce à une télécommande de
télévision. Il devait également être équipé d’un pied motorisé permettant le tir d’une balle.
I. Cahier des charges
Voici les exigences de mon professeur, concrenant la réalisation du robot :
Robot contrôlable via télécommande infrarouge.
Simulation complète réalisée sur Tinkercad avant montage.
Prototype destiné à une Journée Portes Ouvertes.
Présence d’un pied motorisé pour tirer une balle.
II. Liste de matériel utilisé
Afin de réaliser le robot, j'ai dû utilisé de nombreux composants électroniques. Voici la
liste ci-dessous :
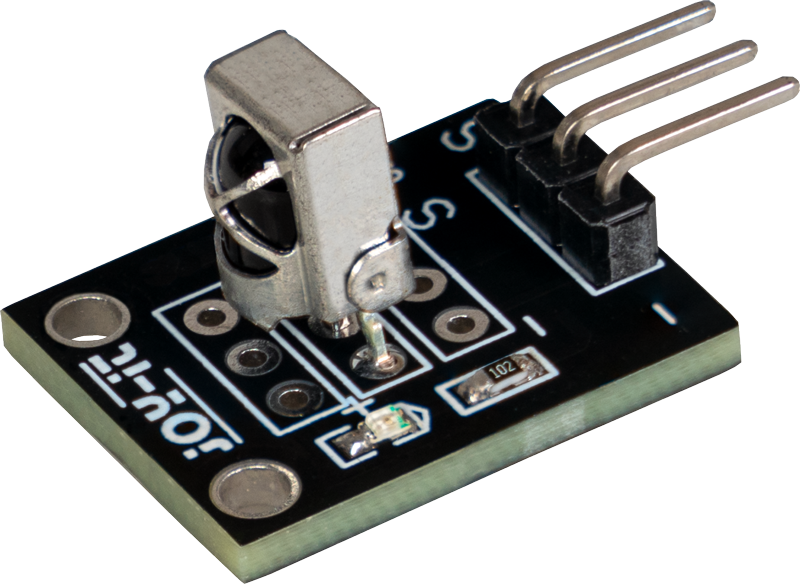
Capteur infrarouge :
Le capteur infrarouge permet de récupérer les singnaux infaourge de la télécommande afin de
les communiquer à la arte Arduino pour le traitement.
Servo moteur :
Le servo moteur, est un moteur caple de faire une rotation de maxumum 180°. Il fait office
de pied et permet de tirer sur des petites balles.
Arduino MEGA :
Il s'agit de la carte maintresse du robot. C'est elle qui relie tous les composants, traite
les données reçues et actionnes les actionneurs en fonction du résultat du
traitement.
Mini platine d'essaie :
Il s'agit d'une petite plaque utilisée pour brancher certains des composants sans soudure,
grâce à des contacts internes.
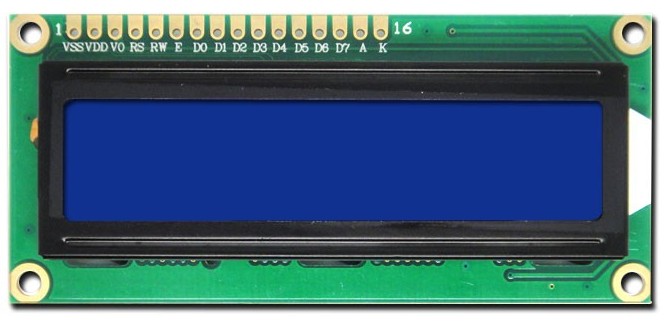
Écran LCD 16x2 :
Il s'agit d'un écran de 2 lignes de 16 caractères, utilisé pour afficher des message ou des
informations.
Câbles mâle-mâle :
Ce sont des câbles dont les deux extrémités possèdent des connecteurs mâles (avec des
broches).
Câbles mâle-femelle :
Ce sont des câbles qui se composent d'un connecteur mâles d'un côté (broches), et d'un
connecteur femelle de l'autre (réceptacle).
Télécommande de projecteur :
Il s'agit d'un composant envoyant des ondes infrarouges à un capteur infrarouge afin
d'interagir avec un appareil multimédia.
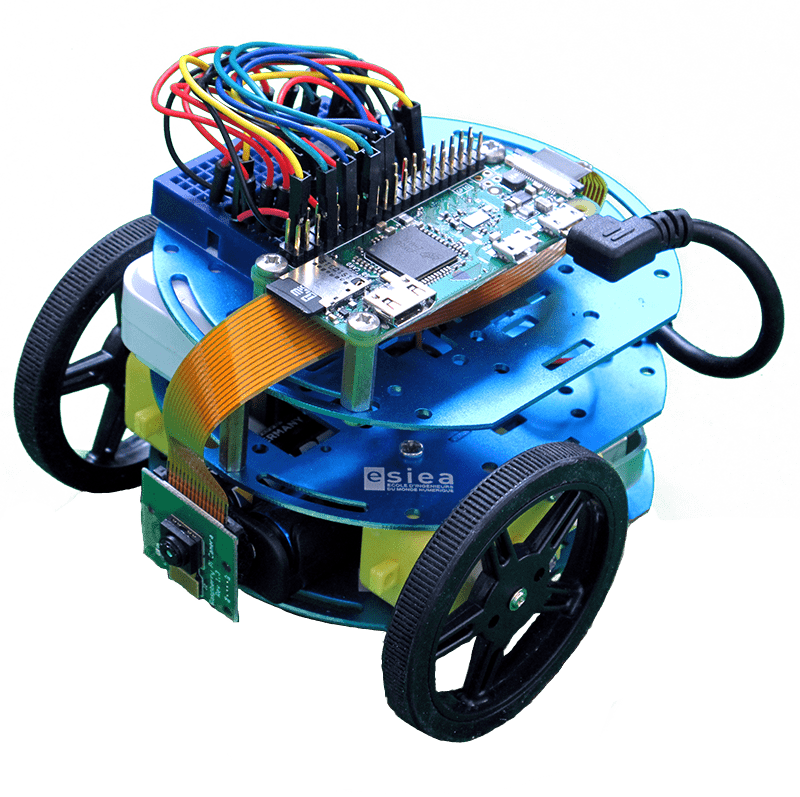
Esieabot :
Il s'agit d'un robot fournis par l'école ESIEA. Il m'a été imposé comme base par mon
professeur.
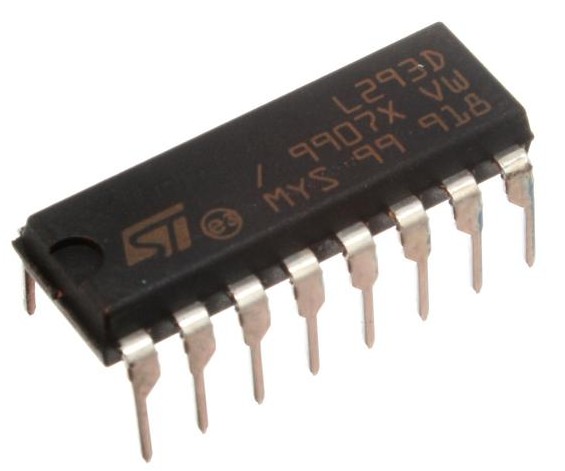
Pont en H 239D :
Il s'agit d'un composant éléctronique permettant de contrôler des moteur DC. Ainsi, il est
possible de les faire tourner dans les deux sens
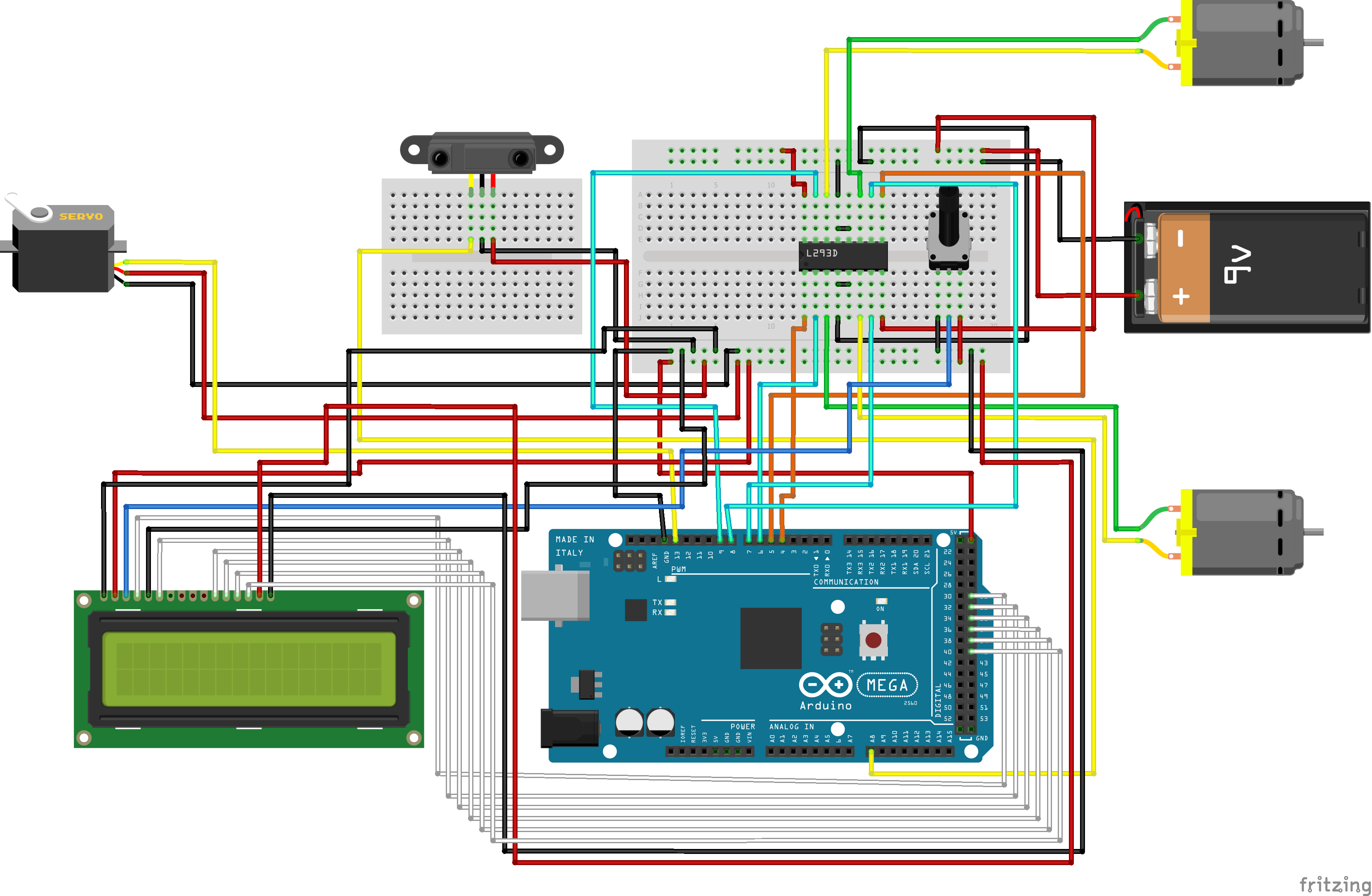
III. Schéma électronique
Avant de monter le robot physiquement, j’ai réalisé le schéma électronique du robot sur Fritzing. Voici le schéma
ci-dessous :
IV. Démonstration
Voici les vidéos montrant le fonctionnement du robot :
Vidéo 1 : Fonctionnement du piedVidéo 2 : Fonctionnement de l'écran LCDVidéo 3 : Fonctionnement du robot
Conclusion
Lors de l'évenement organiser par mon école, mon professeur à pleinnement été sasisfait par
mon travail et donc par le résultat final. Ce projet m'a permis d'avoir une permière
approche concernant le réalisation et la livraison d'un projet auprès d'un commenditaire.